TEL.06-6879-7786
〒565-0871
大阪府吹田市山田丘2-1電気系E6E 5階
RESEARCH
研究内容脳の視覚情報処理の研究と人工視覚の探求
生物が誕生して以来進化し続けて来た脳は、自然が創った情報処理システムの傑作です。この脳の計算能力、特に感覚情報の計算能力は、最新のコンピュータをもっても及ばないレベルです。私たちの研究室では、脳における視覚情報処理の計算原理を先端生体計測の研究手法を用いて調べ、得られた知見に基づいて今までにない全く新しい視覚システム、すなわち人工視覚を創ることを目指しています。またこうして創ったシステムをロボットの眼や重度視覚障害者の方々の視覚機能代行デバイスとして応用するための以下の研究を行なっています。
目に入った外界の像は、角膜、レンズを通って眼球の奥にある網膜に投射されます。脳神経系による視覚情報の“計算”は、網膜にある視細胞によって光が電気信号に変化されることから始まります。電気信号に変換された画像情報は、複雑な網膜神経回路によって巧妙に処理され(図1)、網膜の出力細胞である神経節細胞(視神経)によって脳へと送られます。網膜は単なるセンサーではなく、複雑な外界像から重要な情報を抽出して脳へと送る、優れた視覚情報計算機なのです。この情報処理の原理と対応する回路メカニズムを解析・解明すること(⇒研究1−1へ)は、神経科学のみならず情報科学、ロボット工学などにとっても非常に意義のあること(⇒研究1−2、1−3へ)です。
人工眼はロボットビジョンとしても応用していますが、もっとも重要な応用として、視覚を失った全盲者の方々の、視機能の部分的な再建への応用を目指しています。
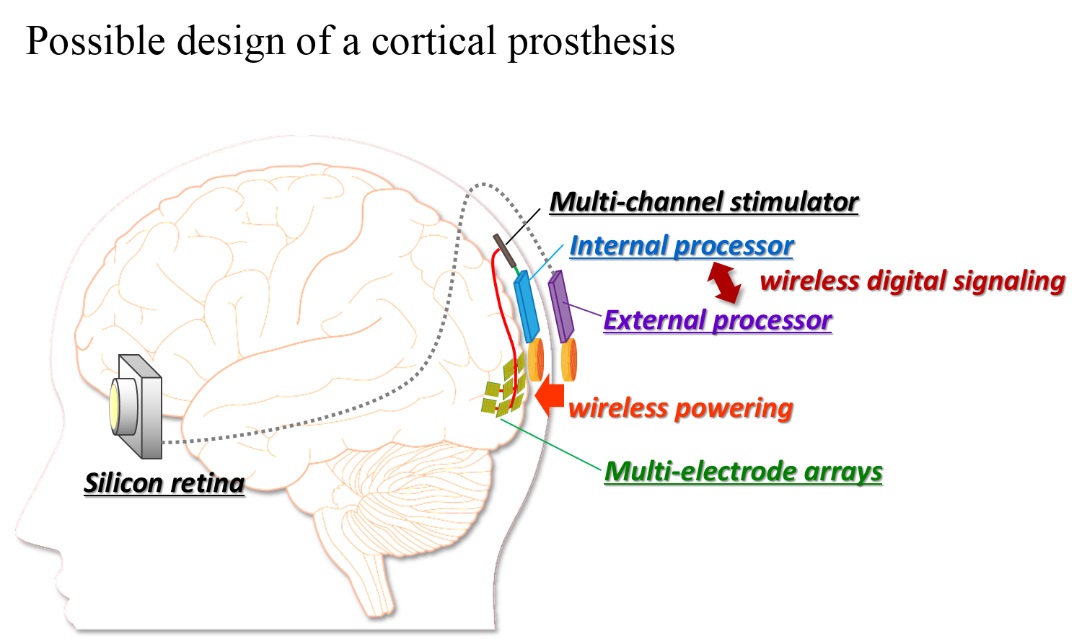
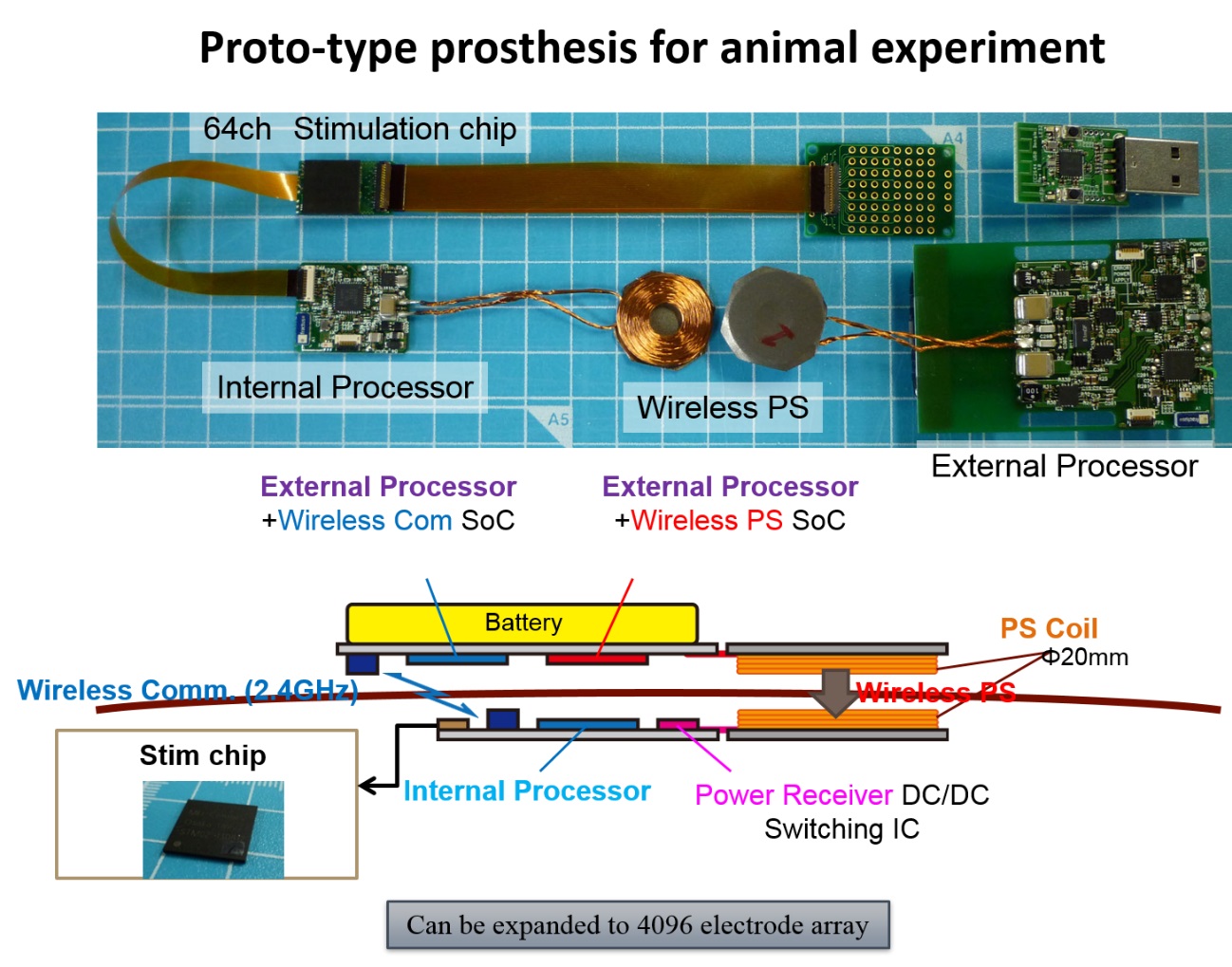
網膜を含む脳視覚神経系の一部の損傷または変性により失明した場合、多くの場合これを回復することは困難です。しかしながら、この損傷・変性した組織の機能を部分的に代行する人工目を開発し、その情報を電気的に脳(大脳視覚野)へ伝えることができれば、部分的には視覚を取り戻せると期待されます。ここでは私達が開発した人工網膜を応用した視覚再建システムの開発を行っています。視覚再建システムの開発を目指すには、工学的な視点からも様々な大きな課題を克服しなければなりません。まず人工眼の情報を、どのように電気信号として脳視覚野へ伝えればよいのか、が大きな問題です。現在のところ、人工眼の出力を外部装置から無線によって脳表面に体内移植された刺激デバイス(⇒研究2−1へ)に伝え、このデバイスから電気刺激を行います。この電気刺激によって視感覚を誘発し、失明した方々の視覚の一部を再建する訳です。ここで、人工眼によって処理した画像を使って、どのように視覚野を電気刺激したらよいか、ということが問題になります。この問題を克服するために、電気刺激が脳視覚野の神経回路を興奮させる状況を動物実験によって観察し(⇒研究2−2へ)、得られた結果に基づいて、視覚再建システムによって誘発される視覚をコンピュータシミュレーションによって再現しながら(⇒研究2−3へ)、より有用なシステムのデザインを考えます。また刺激に用いる電極とその加工技術(⇒研究2−4へ)も今後の開発改題です。
〔研究1−1〕網膜は何を見てどんな信号を脳に送るのか?
網膜の出力である神経節細胞は、活動電位と呼ばれる1ミリ秒程度の幅の電気パルスで応答し、このパルス信号が脳へ送られます。神経節細胞は、ヒトでは百万個以上、マウスでは数十万個程度あります。このことは、目に入ってくる外界像は、時々刻々と多数の神経節細胞が発する電気パルスの分布に変換されて、脳まで到達する訳です。ここでは、外界像がどのように電気パルスの分布に変換されているか研究しています。目的で、小動物の網膜に様々な画像を見せて、網膜細胞の応答を多点電極のアレイで記録し解析します。電気パルスの分布は、外界像とは似ても似つかない画像表現ですが、ともかくこの時空間パターンの中に、我々が外の世界を視覚的に認識するための情報が隠されている訳です。この情報表現と対応する網膜神経回路の構造とメカニズムを解明することが課題です。
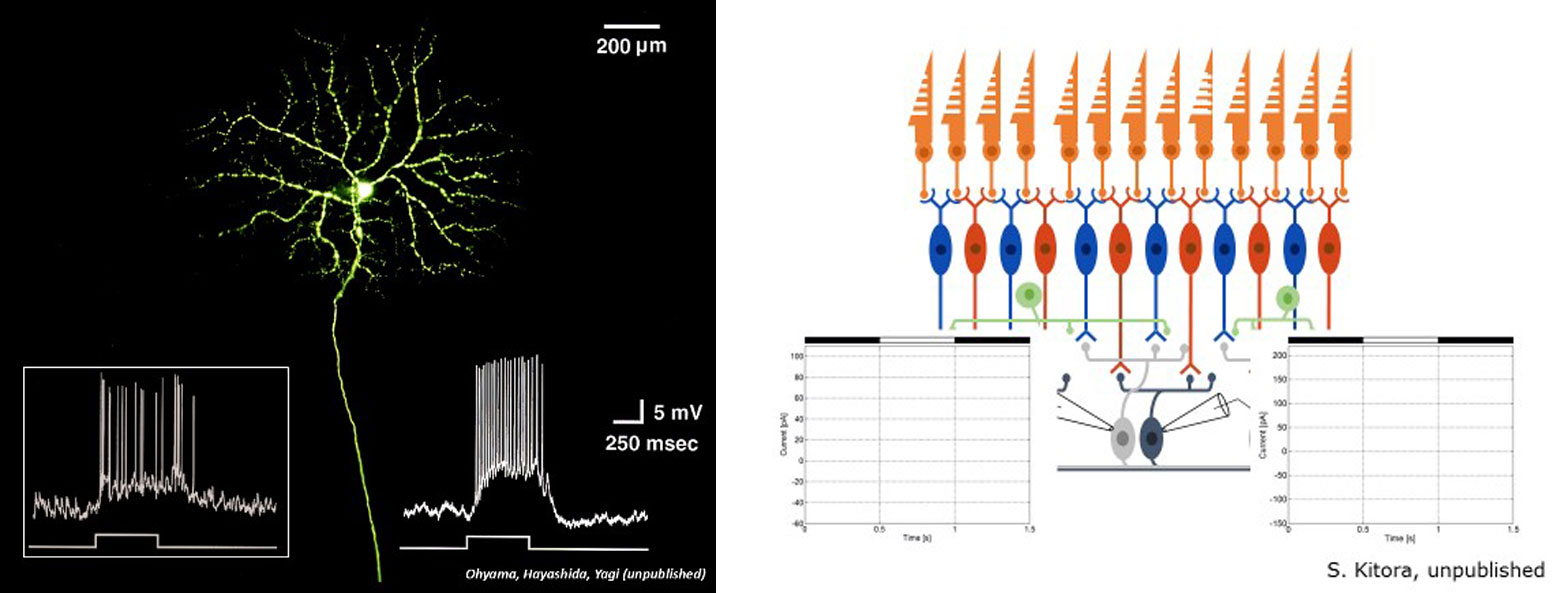
網膜の神経回路はあまりに複雑で、かつ生理学実験には多くの技術上の制約があります。特に生物が眼球を動かしながら、網膜がどのような情報を脳へ送っているかは、ほとんど分かっていません。そこで私たちは、過去の実験研究によって予想されている神経回路のモデルを参考にして、集積回路技術によってその回路を再構築しています(人工網膜)。この人工網膜を眼球運動ロボットに搭載して(これを人工眼と呼んでいます)、人工眼が何を見ているのか、すなわち網膜はどのような情報を脳へ送っているか、を解析します。人工網膜は、網膜の情報処理方法に似た原理、言い換えれば通常のデジタル画像処理と全く異なった原理で画像処理を行います。自然な視覚環境の下での視覚入力と人工網膜の出力を可視化しながら比較検討することで、網膜は従来言われていたよりもはるかに高度な情報処理をしている可能性がクローズアップされてきました。この機能を解明することは私達の視覚能力を知る上で非常に興味深いだけでなく、この機能を全く新しいロボットビジョンとして応用することは工学的に意義の深いことです。私たちは、網膜の機能を新しいロボットビジョンの開発にも応用しています。
以上で述べた実験およびシミュレーション解析の結果を参考にして、脳視覚野刺激型の人工視覚システムを設計・製作しています。こうした体内移植型の人工氏システムは、材料等の生体適合性のほかに、小型であること、発熱が少ないこと、安全な刺激を安定して供給できること、など一般の情報機器とは全く異なるレベルの性能が要求されます。現在は動物実験を念頭にしたシステム開発を行っていますが、将来はこのシステムを完全集積回路化し、さらなる予備試験を繰り返した上で、臨床試験に適応可能なシステムの開発を目指します。
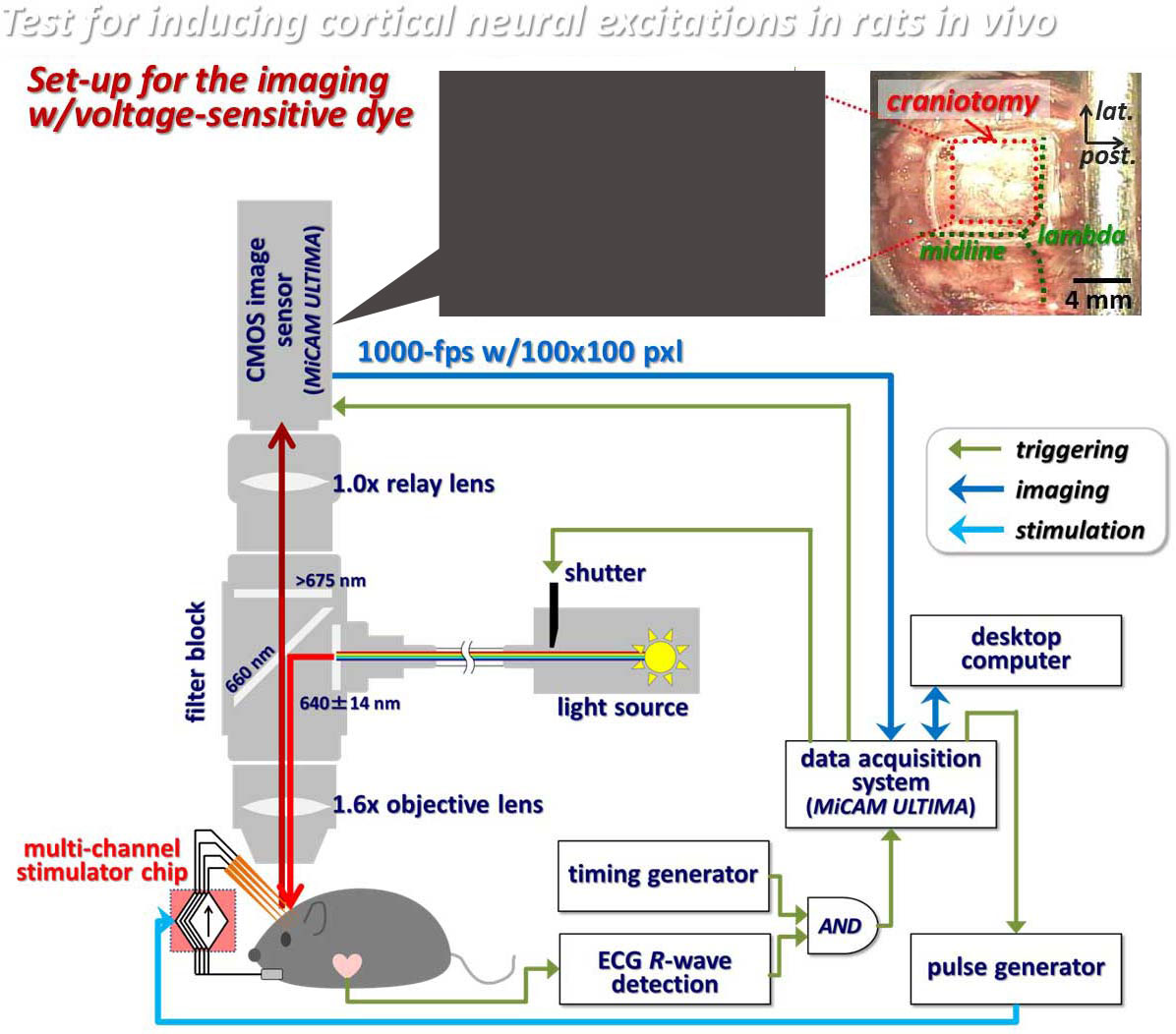
〔研究2−2〕視覚野への電気刺激効果と最適な刺激方法についての実験研究
もちろん一言に脳への電気刺激と言っても、有用な視覚を再建するためには、電気刺激自体の影響、効率的、効果的な刺激パターン、安全性などを精査する必要があります。ここでは、ラットやマウスなどの小型動物を用いて、電気刺激に対する視覚野の応答を調べます。応答の計測には、電気的な計測のみならず、脳の活動に反応し光学的な性質が変化する物質を用いて、脳の興奮をイメージング(像でとらえる)技術を用いています。この技術によって、電気刺激によってV1に誘発された興奮が高次の視覚野にどのように伝わっていくが計測できます。この様子と電気刺激方法の関連を調べ、最適に視感覚を誘発させる方法を調べます。
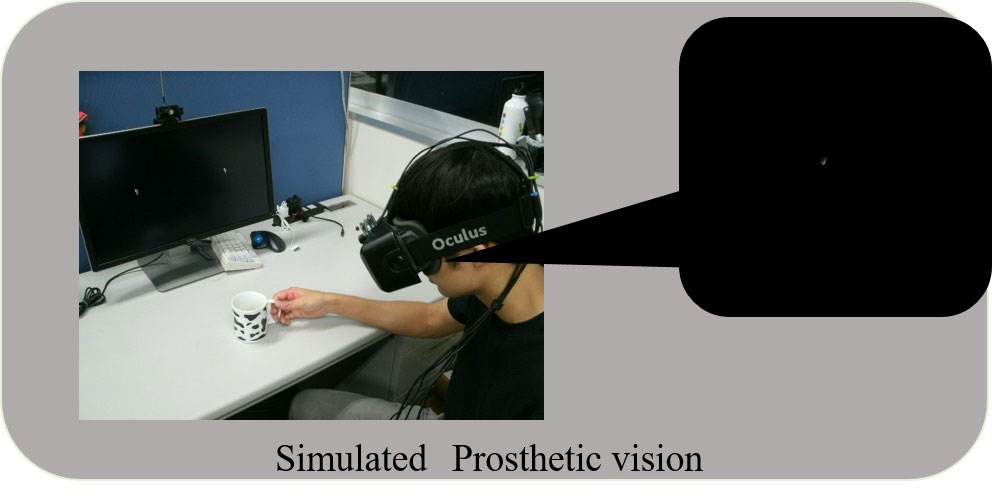
電気刺激によって誘発された光覚のパターンから、どのような画像が認識されるかは単純には予測できません。そこで私達は、過去の数少ない貴重な臨床試験の結果、先に述べた本研究室での動物実験の結果、過去の生理学や解剖学の知見などを参考にして、現在開発中の人工視覚システムによってどのような光覚のパターンが誘発されるかをシミュレーションによって解析しています。このシミュレーションを、より安全で効率的に視覚を再建できるシステムのデザインに役立てます。
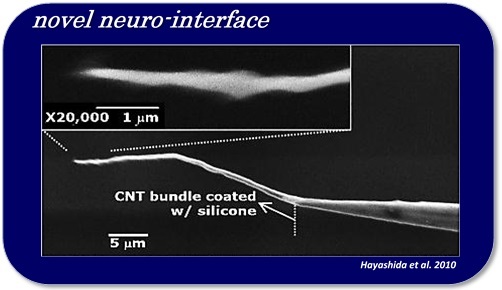
脳への電気刺激により神経細胞群の活動を効率よく引き起こすためには、脳の表面よりもその内部に電極を挿入することが重要です。過去の臨床試験では、電極を内部に設置することで、神経活動の誘発に必要な電流量を表面の場合に比べて2桁程度低く抑えられることが知られています。但し現状では、こういった電気刺激用の電極に希少金属素材が用いられており、その電気化学的特性から、電極サイズをさほど小さくして用いることができません。従って、将来的に多数の電極を駆動して、より高度な人工視覚を実現するためには、新たな電極が必要となります。そこで私たちは、ナノ材料を用いて、生体への親和性と優れた電気化学的特性、さらに柔らかくて微細な神経刺激用電極を開発しています。